Data Resource Description AirData Beta Open data for international development Buenos Aires Data Buenos Aires Open Data Portal Center for National Geographic Information Download center for National Center for Geographic Information (CNIG) Columbia University...
After searching for a cheap gimbal for my mobius camera my eyes fell on a mobius goodluckbuy gimbal which is in theory is designed to be used with a GoPro camera but I read in the comments that...
After flying the Reptile 550 and the DJI Flamewheel 450 frames I decided to move on with the Tarot 650 frame which will give me the opportunity to try bigger motors and propellers for maximizing the flight...
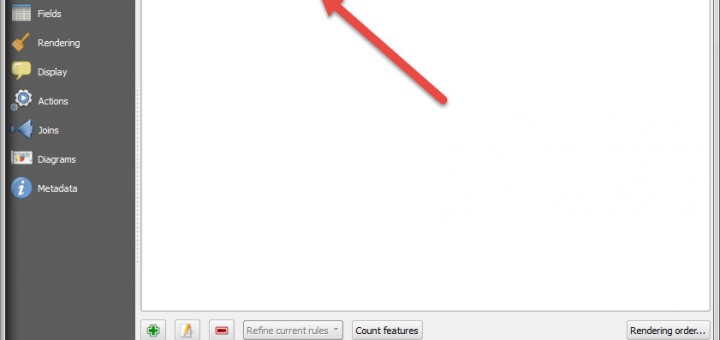
Lately, I wanted to export a map from qgis to a pdf displaying each one from the 200 features I had. So I wanted to print 200 pdfs and for that I used atlas feature...
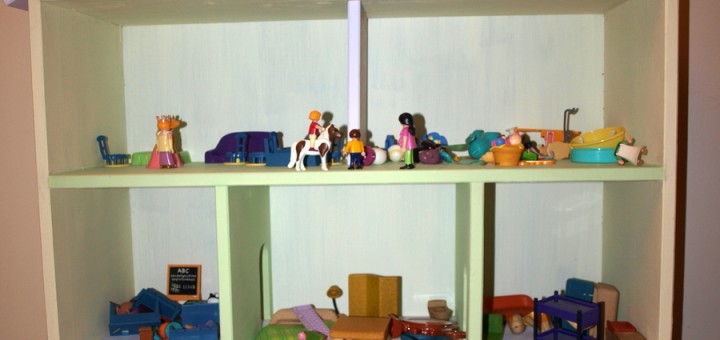
This is how I made a 80×120 cm dollhouse for my 2 girls by using basic tools and paint colors from their rooms I already had . I used cheap softwood (pine) and glue +...
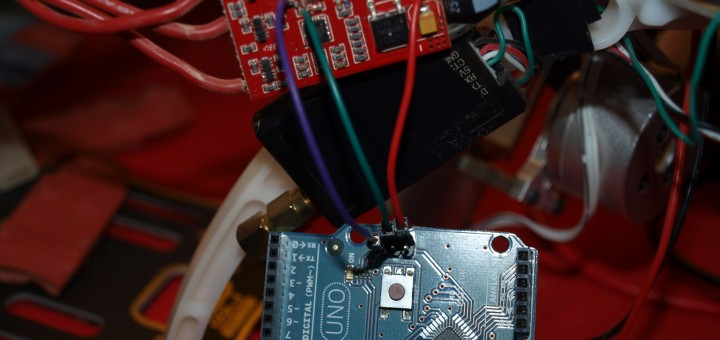
29 January 2015 This is how I flashed my Turnigy Plush 25A (Silabs) ESCs with the BLHeli firmware. BLHeli Firmware is the alternative of SimonK to the ESCs with a Silabs chip, and offers...
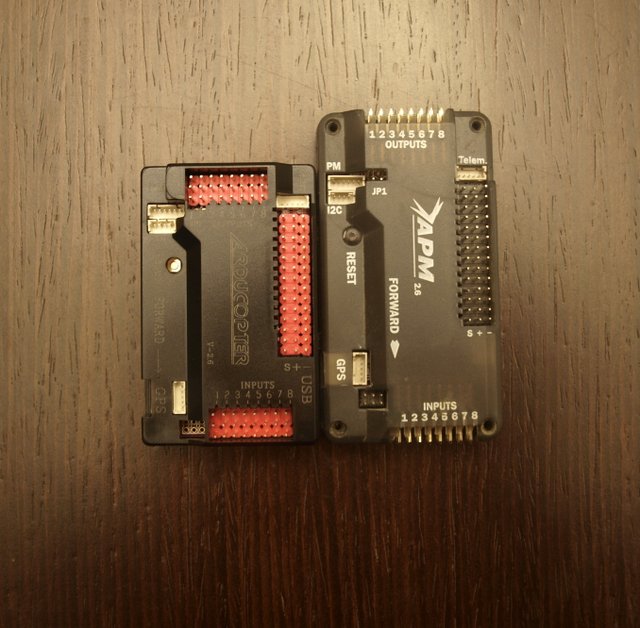
Today, 3 weeks (which is good!!) after having ordered an APM 2.6 clone from DealExtreme for 39 euros it finally arrived. This clone is manufactured by a company in China named ZnDiy-BRY and it...
This post is about how to install CHDK on a Canon camera quickly and easy. All thanks to the great software STICK written by Dave Mitchell. But first of all: What is CHDK? Canon Hack...
SunnySky X2212 980kV is the motor I chose for my medium weight quadcopter (Frames:Reptile 550 and then the DJI F450). I found them for 13 euros each from Banggood. They need 2s or 3s batteries...
This post would be my diary in Aerial Photographing taken by my converted IR Canon A490.I will update it whenever a flight has something valuable to show. I will try to keep a single format in...
After flying the Reptile 550 and the DJI Flamewheel 450 frames I decided to move on with the Tarot 650 frame which will give me the opportunity to try bigger motors and propellers for maximizing the flight...
Welcome to my F450 Quadcopter Diary. This is my small quadcopter. I will be using it mostly for taking aerial images using my 2 Canons: A2200 and A490 (IR converted). In this diary I will be recording anything...