A blog about GIS, Multirotors, Aerial photography and DIY projects. Blog
Secure your wordpress site (https) fast and free with Virtualmin and Let’s Encrypt
Google wants everything on the web to be travelling over a secure channel. That’s why in the future your Chrome browser will flag unencrypted websites as insecure, displaying a red “x” over a padlock...
Wanhao Duplicator i3 v2.1
I recently ordered a Wanhao Duplicator i3 Plus 3D printer from http://www.technologyoutlet.co.uk through www.amazon.co.uk for 379£ + 25£ shipment =406£. 1 week later I had the package in my hands. After opening it I realised...

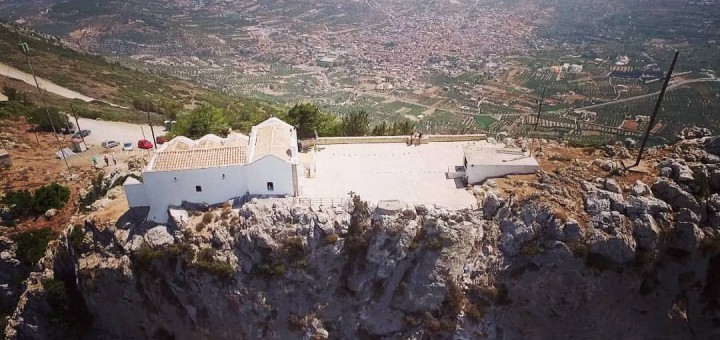
Close up of Giouchtas Mountain
The Close up of Giouchtas Mountain video was shot from my DJI Phantom3 and postprocessed in Adobe Premiere. As you can watch from the video I did some very risky shots – about 3 meters from...

Drone video of Voulismeno aloni, Heraklion Crete
Voulisma in Crete means a depression and Voulismeno Aloni means a threshing floor in a depression. In this case it is not actually a threshing floor but a circular doline, like a crater near...
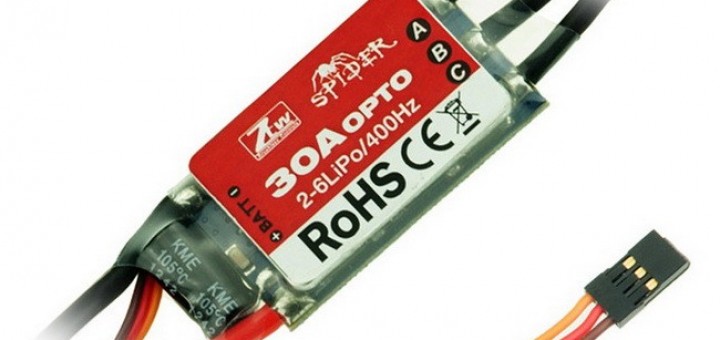
How to flash a ZTW Spider 30A OPTO ESC with the latest SimonK firmware by using an AFRO USB programmer
Parts needed: ZTW Spider 30A OPTO Esc Afro ESc USb Programming Tool RapidFlash ESC Chrome App Procedure: Connect ESC to the AFRO ESC Usb programming tool (the – and the signal pin) Connect the...

Almiros’ Spring Heraklion Crete Greece – Aerial Video from my Phantom 3 Advanced
Almyros spring can probably most satisfactory explain the term paradox. This spring is located at the northeastern side of Psiloritis, a few hundred meters far from the sea and the city of Heraklion, and...

How to mount Tarot TL65B44 rectactable landing gear onto the Tarot 650 frame
I have recently bought 2 Tarot TL65B44 electric landing gears for my Tarot 650 from Banggood for 32 euros (link). But unfortunately there were not any instructions into the package. So after some research I think the best way...

UAS Photogrammetric Point Clouds: A Substitute for LiDAR?
Download the pdf here No topic in the remote sensing community was hotter in 2014 than Unmanned Aerial Systems (UAS) and it appears that will also hold true for 2015. Arguably the biggest UAS...

